Autonomous Control Design | 自動制御設計
- Projection-oriented learning control (POLC)-based high-performance and high-efficiency control design | 予測指向型学習制御に基づく高性能・高効率制御設計
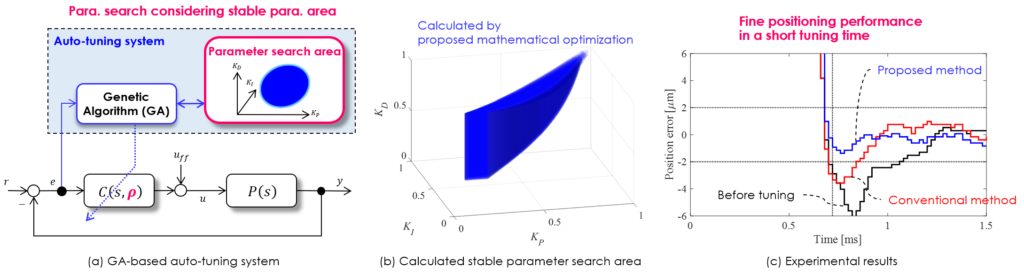
- Cooperative optimization (CoOP)-based autonomous optimal design of structure and parameters of feedback controller | 協調型数理最適化に基づくフィードバック制御器の構造とパラメータの自動最適設計
- Optimization algorithm-based data-driven automated-tuning of control parameters | 最適化アルゴリズムに基づく制御パラメータのデータ駆動型自動調整
Advaned Motion Control | アドバンストモーションコントロール
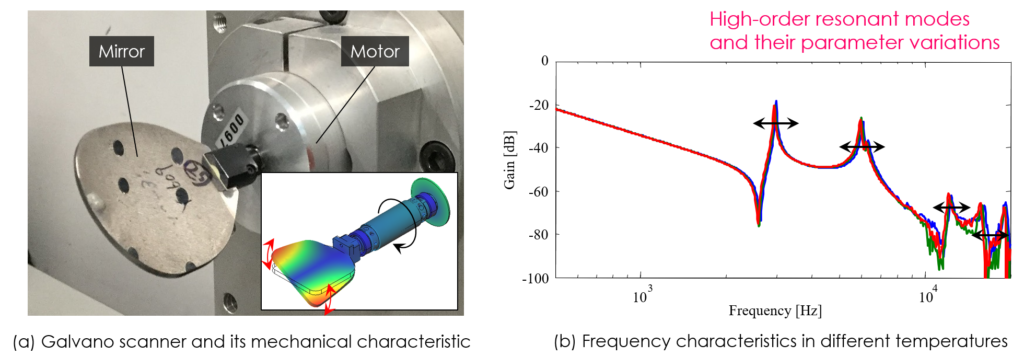
- Robust vibration suppression control for resonant servo systems | 共振系に対するロバスト制振制御
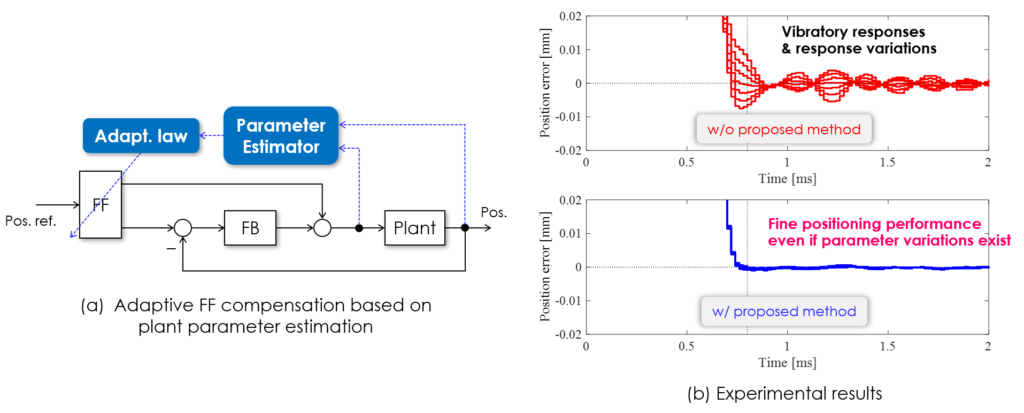
- Adaptive/robust feedforward control against plant perturbations | プラント変動に対する適応型/ロバストフィードフォワード制御
- Plant FRF identification using point-to-point motion data / 位置決め動作信号を用いたプラント周波数応答関数同定
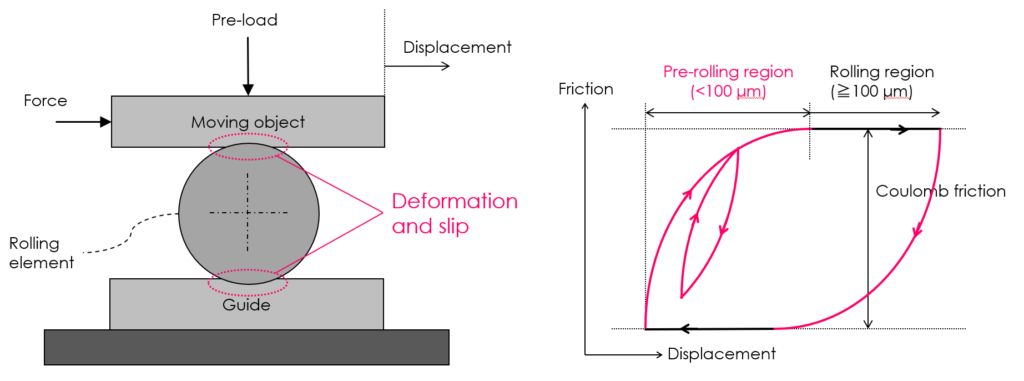
Friction Modeling and Compensation | 摩擦モデリングと補償
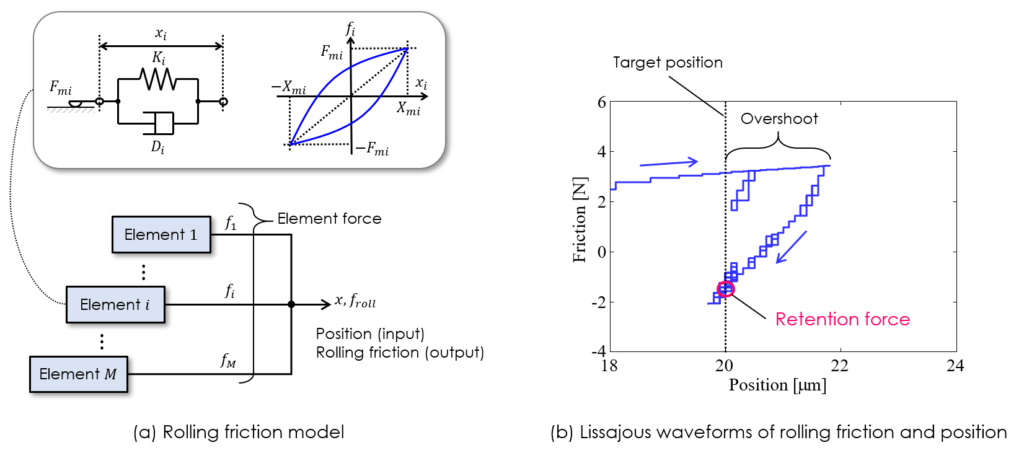
- Modelling and analysis of rolling friction | 転がり摩擦のモデル化と特性解析
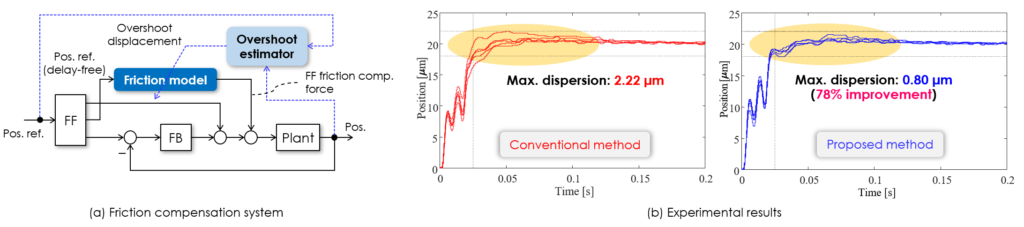
- Model-based friction compensation for precision positioning / 高精度位置決めのためのモデルベース摩擦補償
- Plant FRF identification for frictional servo systems / 摩擦システムに対するプラント周波数応答関数同定