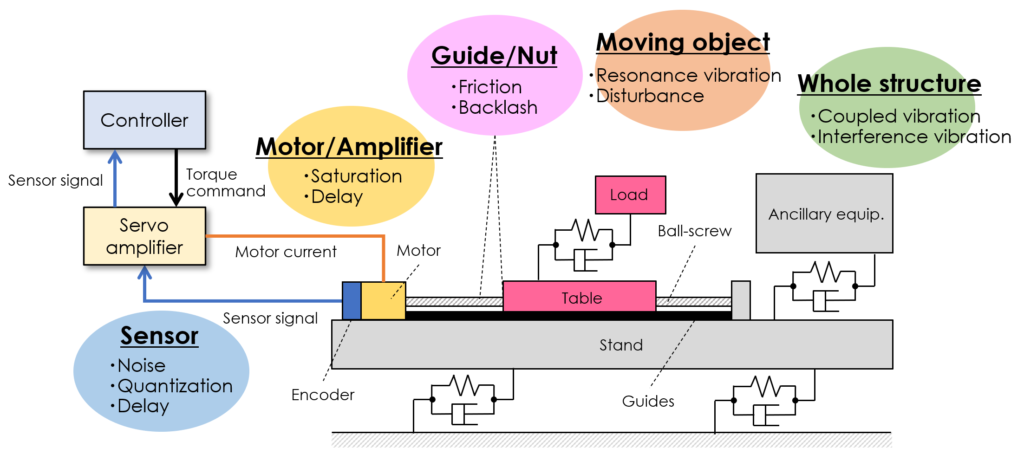
Our laboratory conducts research and development on motion control for a wide variety of control targets, ranging from high-precision servo systems used in electronics processing machines and semiconductor manufacturing/inspection equipment, to large conveyance systems used in logistics centers. We particularly focus on “vibration suppression control” and will contribute to solving various problems in industry by creating innovative control technologies that are “simple, automatic, and high-performance.”
私たちの研究室では、電子部品加工機や半導体製造・検査装置などで用いられる精密サーボシステムの超高速・高精度位置決め制御から、物流センターなどで用いられている搬送システムの高速・高精度運動制御まで、多様な制御対象に対するモーションコントロール(運動制御)の研究・開発を行っています。特に”振動抑制制御”にポイントを置いており、”シンプルで、自動的に、高性能な”新しい制御技術の創出によって、産業界における様々な課題解決に貢献していきます。
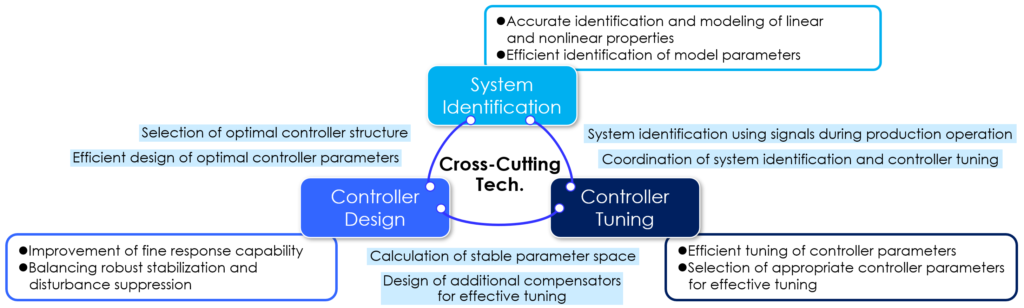
Aiming for simple, automatic, and high-performance control technology, we are focusing on the three design processes of “system identification and modeling,” “controller design,” and “controller tuning,” and concentrate on (1) pursuing elemental technologies in each process and (2) creating cross-cutting technologies to fully automate the entire process (Fig. 2).
The research topic (1) extremely pursues universal performance indices of motion control, such as fast-response and high-precision, considering the essence of each process. We advance elemental technologies through various approaches, such as control theory, measurement and analysis techniques, optimization algorithms, and signal processing, while incorporating innovations for “simplicity”.
On the other hand, the research topic (2) is aimed at new developments in motion control. High-performance motion control is one of Japan’s world-leading research fields. However, since engineers involved in the control design require advanced knowledge and skills, it is hard to spread the high-performance motion control technologies in industry due to time and human cost issues. Looking to the future, the working-age population (15-64 years old) is expected to decrease to 65% of the 2010 level by 2060, making it even more important to increase productivity. To sustain and accelerate the creation of innovative technologies, we aim to create next-generation autonomous control design technologies that pursue both control performance and control design efficiency by coordinately executing all design processes. We believe that the keys to the autonomous design are the cross-cutting technologies that bridge each process, and we are particularly focusing on research and development of the technologies.
シンプルで・自動的に・高性能な制御技術を目指して,「システム同定・モデリング」、「コントローラ設計」、「コントローラ調整」という3つの設計プロセスに着目し,①各プロセスを支える要素技術の追及と②全プロセスを完全自動化するための横断的技術の創出に注力しています(Fig. 2)。
①は,高速性・高精度性というモーションコントロールの普遍的性能指標を,各プロセスの本質(勘どころ)をおさえて極限まで追求することに集約されます。制御理論,測定・解析技術,最適化アルゴリズム,信号処理など,多角的なアプローチによる要素技術の深掘りを行っていますが,「シンプルで」のための工夫も同時に考慮して研究を推進しています。
一方,②はモーションコントロールの新展開を目指した研究です。高性能モーションコントロールは我が国が世界をリードする研究分野の一つですが,高度な知識・技術を必要とするため,時間的・人的コストの観点から産業界に広く普及・実装されているとは言えません。また,将来に目を向けると,2060年には生産年齢人口(15~64歳)が2010年時の約65%まで減少する見込みであるため,いかに生産性を高めるかがより一層重要となります。技術立国として革新的な技術の創出を持続・加速するために,全設計プロセスを協調して実行することで制御性能と制御設計効率を高度両立することを特徴とする次世代自動制御設計技術の創出を目指しています。そこでは各プロセスの橋渡しを担う横断的技術が鍵と考えており,その研究開発に特に注力しています。